Hoists |
  
|
Hoists |
|
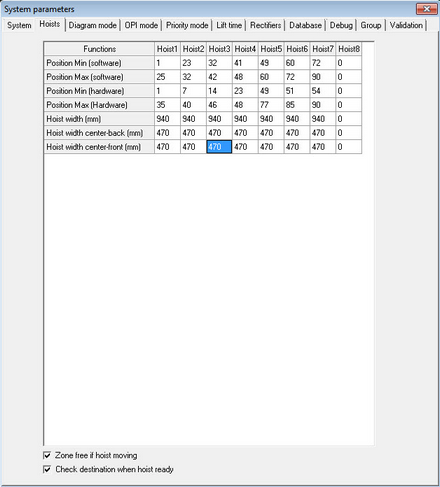
La case à cocher "Zone free if hoist moving" est utilisé par le système d'anti-collision. Si cette case est cochée et qu'un transporteur doit se déplacer dans une zone qui est déjà occupée par un autre transporteur mais que celui-ci est en train de ce déplacer vers l'extérieur de cette zone alors l'autorisation de déplacement sera donnée au transporteur. Si cette case n'est pas cochée, le transporteur aura l'autorisation de se déplacer dans une zone que si celle-ci est libre et qu'aucun transporteur n'est en train de se déplacer vers cette zone.
La table suivante permet de définir les paramètres des transporteurs de la machine.
Représentation avec machine type FPL: Représentation avec machine type FCL:
Function |
Description |
|---|---|
Position Min (software) |
Position logique minimale du robot. |
Position Max (software) |
Position logique maximale du robot. Les positions logiques minimales et maximales sont utilisées pour déterminer quel transporteur il faut utiliser pour exécuter un mouvement. |
Position Min (hardware) |
Position logique matériel du robot. Le robot ne peut pas physiquement aller sur une position plus petite que celle indiquée ici. |
Position Max (hardware) |
Positon logique matériel du robot. le robot ne peut pas physiquement aller sur une position plus grande que celle indiquée ici. Ces positions sont utilisées lors des déplacements manuels des transporteurs (avec la télécommande). Elles sont également utilisées pour déterminer quel transporteur il faut utiliser lorsque les positions logiques ne trouvent pas de solutions. |
Hoist width (mm) |
Largeur du transporteur. |
Hoist width center-back (mm) |
Largeur entre le centre du transporteur (centre d'une position) et l'arrière du transporteur (point le plus éloigné de la position 1) |
Hoist width center-front (mm) |
largeur entre le centre du transporteur et l'avant du transporteur (point le plus proche de la position 1). |
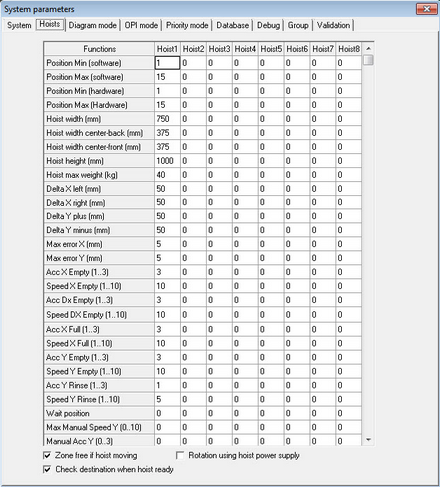
Hoist height (mm) |
Course maximale verticale du transporteur (Utilisée pour dessiner la hauteur du bras dans la machine). |
Hoist max weight (kg) |
Poids maximum de transport. (n'est plus utilisé) |
Delta X left (mm) |
Longueur de dégagement à gauche pour faire un décrochement |
Delta X right (mm) |
Longueur de dégagement à droite pour faire un décrochement. |
Delta Y plus (mm) |
Longueur de déplacement en dessous pour faire un dégagement. |
Delta Y minus (mm) |
Longueur de déplacement en dessus pour faire un dégagement |
Max error X (mm) |
Erreur maximale horizontale autorisée. A la fin d'un déplacement, si la différence entre la position horizontale de destination demandée et la position horizontale de destination réelle est plus grande que cette valeur alors le système répète la commande de déplacement. Cette valeur est également utilisée pour calculer si le robot est centré sur la position on non. Si la différence entre la valeur de positionnement du centre de la position et la position réelle est plus petite ou égale à cette valeur alors le transporteur est considéré comme centré et si un mouvement vertical est effectué, le transfert de la charge de la cuve sur le transporteur ou du transporteur dans le cuve sera effectué lors du passage de la hauteur de dépose en dessus ou en dessous. |
Max error Y (mm) |
Erreur maximale verticale autorisée. A la fin d'un déplacement, si la différence entre la position verticale de destination demandée et la position verticale de destination réelle est plus grande que cette valeur alors le système répéte la commande de déplacement. |
Acc X Empty (1..3) |
Accélération horizontale utilisée lors d'un déplacement à vide |
Speed X Empty (1..10) |
Vitesse horizontale utilisée lors d'un déplacement à vide. |
Acc Dx Empty (1..3) |
Accélération horizontale utilisée lors d'un dégagement horizontal à vide. |
Speed Dx Empty (1..10) |
Vitesse horizontale utilisée lors d'un dégagement horizontal à vide. |
Acc X Full (1..3) |
Accélération horizontale utilisée lors d'un déplacement en charge |
Speed X Full (1..10) |
Vitesse horizontale utilisée lors d'un déplacement en charge |
Acc Y Empty (1..3) |
Accélération verticale utilisée lors d'une déplacement à vide |
Speed Y Empty (1..10) |
Vitesse verticale utilisée lors d'un déplacement à vide. |
Acc Y Rinse (1..3) |
Accélération verticale utilisée lors d'un rinçage du bras |
Speed Y Rinse (1..10) |
Vitesse verticale utilisée lors d'un rinçage du bras |
Wait Position |
Position d'attente lorsque le transporteur n'a rien à faire. |
Max Manual speed X (0..10) |
Vitesse horizontale maximale utilisable lors d'un déplacement avec la télécommande. 0=vitesse de la télécommande |
Manual acc X (0..3) |
Accélération horizontale utilisée lors d'un déplacement avec la télécommande 0=accélération de la télécommande. |
Max Manual speed Y (0..10) |
Vitesse verticale maximale utilisable lors d'un déplacement avec la télécommande. 0=vitesse de la télécommande. |
Manual acc Y (0..3) |
Accélération verticale utilisée lors d'un déplacement avec la télécommande 0=accélération de la télécommande. |
Dy Pick/Drop (mm) |
Delta en mm en dessous de la hauteur de dépose à laquelle le transfert de la cuve au robot ou du robot à la cuve est effectué. |
Horiz. acc. type 1 (ms).. Horiz. acc. type 3 (ms) |
Temps d'accélération horizontale pour atteindre la vitesse désirée |
Horiz. speed type 1 (mm/mn).. Horiz. speed type 10 (mm/mn) |
Vitesse de déplacement horizontale |
Verti. acc type 1 (ms).. Verti. acc type 3 (ms) |
Temps d'accélération verticale pour atteindre la vitesse désirée |
Verti. speed type 1 (mm/mn).. Verti. speed type 10 (mm/mn) |
Vitesse de déplacement verticale. |