System |
  
|
System |
|
L'onglet "System" correspond à des paramètres généraux de l'application. Certains de ces paramètres ne sont utilisés que par des machines de type FCL et d'autres par des machines de type FPL. Il n'y a pas d'indication quant au type de machine concerné c'est pour cette raison que ces paramètres doivent être modifiés que par un personnel compétent.
Représentation avec machine type FPL: Représentation avec machine type FCL:


Check alarm before load:
Avant de lancer le calcul d'intégration d'une charge, le système vérifie si une alarme est présente dans les positions définies dans la séquence associée à celle-ci. Si cette case est cochée et qu'une alarme (ou plusieurs) est présente, la charge ne sera pas intégrée.
Check mode before load:
Avant de lancer le calcul d'intégration d'une charge, le système vérifie si un N° de mode est associé à celle-ci (seulement disponible sur certains type de poste de charge). Si un N° de mode est associé et que cette case est cochée, le système analysera toutes les charges en cours de traitement. Si un autre N° de mode est associé à l'une de ces charges, la charge ne sera pas intégrée.
Force take load:
N'est utilisé qu'en mode "Diagram/OPI". Si un déplacement d'une charge d'une position à une autre est prévu et que le système constate qu'il n'y a pas de charge dans la position d'origine, si cette case est cochée le système forcera le mouvement sans tenir compte de l'absence de la charge. Si cette case n'est pas cochée, le mouvement sera annulé.
Reload after reset:
N'est utilisé qu'en mode "Diagram/OPI". Si cette case est cochée, lors du passage du mode "Program Stop" en "Program Auto", le système vérifie si des mouvement sont associés aux charges en cours de traitement dans la machine. Si aucun mouvement n'est associé, le système re calcul ces mouvements. Dans le cas où cette case n'est pas cochée, la charge est définie comme vide et son historique est perdu.
Unload position as first unload buffer:
Lorsque le système est équipé d'une gare de déchargement, le système termine une charge en la déposant dans cette gare. Si cette case est cochée, avant de choisir une position de gare vide le système vérifiera si un poste de décharge associé à cette gare est libre et prêt à recevoir un charge. Si c'est le cas, la charge sera dépose directement sur ce poste de décharge sans passer par la gare.
Check Rx Load station data:
N'est utilisé qu'en mode "Diagram/OPI". Sur des machines qui ne sont pas équipée d'une gare de chargement ou que le nombre de positions dans cette gare est inférieur au nombre de rack total présent dans la machine, le système viendra prendre cycliquement la charge au poste de charge. Si cette case est cochée, lors du mouvement de prise de charge au poste de charge, le système attendra que l'opérateur ai cliqué sur [Charge] pour continuer. Si cette case n'est pas coché, le système prendra la charge au poste de charge même si l'opérateur n'a pas terminé son opération de chargement. Dans ce cas, la charge sera définie comme vide.
Repeat load (Load station 1):
Si cette case est cochée, les données du dernier chargement sont répétées dès la présence d'une charge sur le poste de charge N° 1. Si elle n'est pas cochée, lors du chargement des données par l'opérateur au poste de charge, ces données sont transférées à la charge puis effacées.
Load report only:
Présent pour compatibilité avec les anciennes versions. Ne doit pas être coché.
Force repeat move:
Avant d'envoyer la commande de déplacement horizontal d'un transporteur à une position, le système vérifie si cette position est différente de la position actuelle. Si cette position est la même et que cette case n'est pas cochée, la commande ne sera pas envoyée. Dans le cas où cette case est cochée, la commande sera tout de même envoyée (utile dans certains cas pour recentrer le transporteur au milieu de la position).
Jig detectors enable:
Il est possible d'associé des détecteurs de rack sur les transporteurs et dans le positions de la machine au travers des mots clef définis dans la section [Special] du fichiers IO.ini. Pour activer la prise en compte de ces détecteurs il faut cocher cette case. Dans le cas contraire, ces détecteurs ne seront pas actifs.
Buffer to strip only:
Dans les machines équipées d'une gare de chargement, seules les charges associée à une séquence de strippage sont intégées sans tenir compte du "Mode buffer Auto". Les autres charges restent en gare et ne sont pas intégrées. Cela permet de charger et de décharger la machine tout en continuant le strippage des racks vides sans envoyer de nouvelles charges en traitement.
Reverse buffer:
Dans les machines équipées d'une gare de chargement, lorsqu'une charge en provenance du poste de charge est déposée dans la gare, la position choisie sera la plus proche du poste de charge. Une charge en provenance de la machine (fin du traitement) est déposée dans la gare dans une position la plus proche de la machine. Si cette case est cochée, la position la plus éloignée sera choisie.
Clear move buffer if emergency stop:
En mode FCL, si cette case est cochée et qu'un arrêt d'urgence intervient alors les buffer de commandes de tous les transporteurs seront effacés
Clear move buffer if origin or joystick:
En mode FCL, si cette case est cochée et que l'opérateur effectue une origine ou passe en mode "Joystick" alors les buffer de commandes de tous les transporteurs seront effacés.
Clear move buffer if manual move with remote control:
En mode FCL, si cette case est cochée et que l'opérateur effectue un mouvement à l'aide de la télécommande (programme Client) alors les buffer de commandes de tous les transporteurs seront effacés.
Need ACK after clear move Buffer:
En mode FCL si les buffer de mouvements ont été effacés, l'opérateur devra effectuer un ACK ![]() sur les télécommandes des transporteurs pour pouvoir continuer.
sur les télécommandes des transporteurs pour pouvoir continuer.
Need Hoists Referenz after clear move Buffer:
En mode FCL, si les buffer de commandes ont été effacés, l'opérateur devra effectuer une origine ![]() sur les télécommandes des transporteurs pour pouvoir continuer.
sur les télécommandes des transporteurs pour pouvoir continuer.
Don't check Start Mode for strip progr.:
Si cette case est cochée, le mode "OK Start Program" n'est pas vérifié pour les programmes de strippage.
Stop rotation after drip:
Si cette case est cochée, la rotation des tonneaux sur les transporteurs est arrêté après l'égouttage sinon elle continue jusqu'à la dépose de la charge dans la position de destination.
Exec "mode first rack" on Add new Jig:
Si cette case est cochée, le N° de mode défini dans le champ # mode first rack est exécuté lorsque la commande d'ajout d'une charge vide est effectuée.
Don't check Hoist pos. on AutoRemoveJig (manu):
Si cette case est cochée, les charges sur les postes de charge et de décharge sont effacées lorsque l'I/O défini dans AutoRemoveJig égale zéro quelque soit la position des transporteurs.
Don't check Hoist pos. on AutoAddJig (manu):
Si cette case est cochée, les charges sur les postes de charge et de décharge sont ajoutées lorsque l'I/O défini dans AutoAddJig égale 1 quelque soit la position des transporteurs.
Force load lift type:
Si cette case est cochée, les types de montées et de descentes définies sur la fenêtre du poste de charge seront utilisées (dépendant du type de poste de charge utilisé).
Full jig at unload not allowed to be taken:
Mode FCL uniquement. Si cette case est cochée, un mouvement vertical sur un poste de décharge avec un rack plein (vert ou rouge) n'est pas autorisé.
Wait sequencer before Up/Down:
Si cette case est cochée, le système attendra l'arrêt des séquenceurs s'exécutant sur une position avant de monter ou de descendre (à condition que l'automatisme "Wait Sequencer" est utilisé.
Check Tmin & Tmax for reporting load error:
Si cette case est cochée, la couleur des charges dépassant les marges TMin ou Tmax sera changée en rouge lors de la sortie de la position. Si elle n'est pas cochée, seules les alarmes intervenues pendant l'immersion dans une position peut provoquer le changement de couleur en rouge.
Check RFID before take load:
Actif seulement en mode "Priority". Si cette case est cochée, le système contrôle la cohérence entre les données du tag RFID enregistrées lors du chargement du rack et la lecture réelle du tag du RFID. Si ces données sont identiques, le transporteur est autorisé à prendre la charge sinon une alarme est générée et le programme passe en mode Stop.
Compute positionning (cover & liftout):
Mode FCL uniquement. Lors du calcul du chemin à effectuer par un robot, le système se base sur l'état des détecteurs de position des liftouts et des couvercles. Par exemple, si le système détecte le liftout dans sa position basse, le passage par dessus la position pourra se faire en bas sans faire un décrochement. Dans certains cas, le retard entre la lecture des détecteurs et l'actualisation des données entraîne une erreur de calcul dans le déplacement du robot ce qui peut provoquer des collisions entre les équipements et les robots. En cochant cette case, le système calcul le déplacement qu'il devrait effectuer dans le pire des cas sans tenir compte des détecteurs.
Do not close cover if hoist on position (FPL):
En mode FPL, la fermeture automatique des couvercles n'est autorisé que si aucun transporteur n'est sur la position concernée ou que cette case n'est pas cochée.
Check support type before loading:
Si cette case est cochée, il est possible de travailler avec un seul type de support en même temps dans la machine. Lorsque de la phase de calcul d'autorisation de chargement, si cette case est cochée, le système analysera toutes les charges en cours de traitement (exception faite des charge se trouvant en gare ou sur un poste de charge ou de décharge). Si le type de support utilisé par la nouvelle charge est différent du type des supports en cours de traitement, la charge est interdite.
Buffer to Machine FIFO:
Lors de la recherche d'un rack à charger dans la gare, le système commence par le plus ancien (le premier introduit) et teste son autorisation de chargement. Si la charge n'est pas autorisée, le système continue sa recherche en testant le suivant et ainsi de suite jusqu'à ce qu'il trouve un rack autorisé. Si cette case est cochée, la recherche est interrompue si la charge la plus ancienne n'est pas autorisée.
Soft pick/drop load:
Mode FCL uniquement. Si cette case est cochée, le transfert de la charge du robot dans la cuve et réciproquement est faite sans tenir compte de la position du robot. Dans le séquenceur de mouvements, lors de la prise d'une balancelle, le système ajoute les commandes de déplacement et à la fin (ou au début s'il s'agit d'une montée) ajoute la commande de transfert.
Working with disable position allowed
Si cette case est cochée, il sera possible de définir une séquence pouvant utiliser les positions hors/service de la machine.
Check mode "OK Start" with sequence positions only
Si cette case est cochée, le système vérifiera uniquement les I/O du mode "OK Start" associées aux positions utilisées dans la séquence uniquement. Sinon, toutes les I/O sont vérifiées.
Load position in sequence steps
Indique au système que le poste de charge peut apparaître dans une séquence. Si le poste de charge est défini dans une séquence et que cette case n'est pas cochée alors le système suppose que c'est la dernière position de la séquence même si d'autres positions sont définies après celle-ci.
Use equipment commands mode
Indique au système que l'on va utiliser les modes de commandes d'équipement. Si cette case n'est pas cochée, alors les menus correspondants aux commandes d'équipement ne sont pas visible dans le programme client.
Open cover before take
Indique au système d'ouvrir le couvercle de la position de destination avant de prendre la balancelle dans la position d'origine.
# mode machine ready:
Lorsqu'un numéro de mode est introduit dans cette case (>0), le système utilise ce mode comme mode de comparaison. Pour chaque élément présent dans ce mode le système compare la valeur associée dans le mode et la valeur actuelle de l'élément. Si le résultat de la comparaison indique une différence, les parois de la position associée à l'élément sont dessinées en mauve dans le dessin de la machine. Si le résultat est identique, les parais sont dessinées dans leurs couleurs originales.
Généralement, le mode N° 99 est utilisé pour cette fonction. Il est possible de définir plusieurs mode de comparaison en séparant ces mode par une virgule. Par exemple, pour définir les modes 97,98 et 99 il faut introduire "97,98,99" dans le champ correspondant.
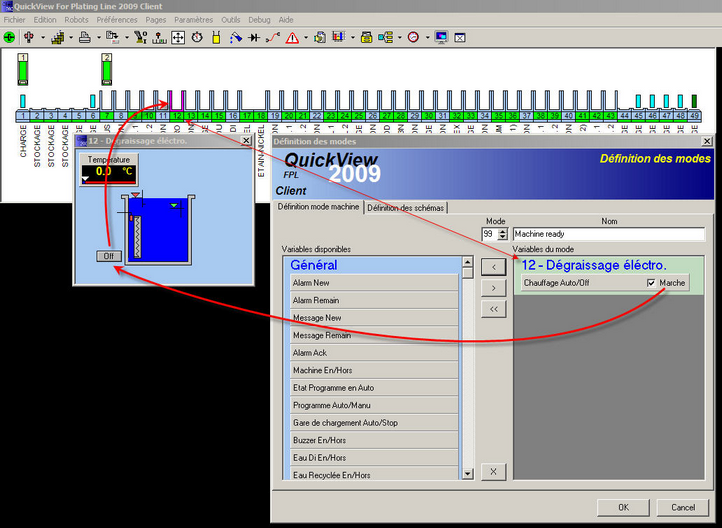
Dans l'exemple ci-dessus, la commande du chauffage de la position 12 doit être en marche pour que la position soit prête. Comme la commande est sur "Off", la position n'est pas prête et les parois de la cuve N° 12 sont dessinées en mauve.
# program strip:
Il est possible de définir 2 programmes de dé métallisation (strippage). Un programme de dé métallisation ne tient pas compte de certaines alarmes pour démarrer. Ils peuvent également démarrer même si le mode gare est sur Stop. Les programmes de dé métallisation ne sont également pas enregistré dans l'historique des charges. Lorsqu'une charge de dé métallisation termine son traitement (retour en gare) elle est définie automatique comme charge vide.
Hoist stabilisation (sec):
Ce paramètre permet d'introduire un temps de stabilisation des charges sur les robots après un déplacement horizontal et avant de descendre dans les positions. Ce temps est exprimé en secondes. Cette stabilisation n'est valable qu'en mode automatique. Elle n'est pas effectuée lors d'une commande de transfert demandée par la télécommande d'un robot.
Tmin when hoist transfert (sec):
Lors du calcul d'intégration d'une séquence, lorsque une charge est transférée d'un robot à un autre, si le temps TMin défini dans la position de transfert (un robot dépose et un autre prend) est plus court que le temps défini dans ce paramètre, il est remplacé par ce paramètre. Par exemple, si l'utilisateur défini une séquence et qu'il défini 5 secondes d'immersion dans une cuve et que cette cuve est utilisée pour transférer la charge d'un robot à un autre, si le temps minimum nécessaire est de 25 secondes, il faut introduire ce temps dans ce paramètre.
Rack stabilisation on load buffer (sec):
Temps permettant de stabiliser les balancelles sur une rampe de chargement à gravitation. Lorsqu'une charge est introduite sur une telle rampe, elle se déplace jusqu'au stoppeurs. En arrivant contre les stoppeurs, elle peut rebondir quelque fois avant de se stabiliser. Le temps nécessaire à la stabilisation doit être introduit dans ce paramètre.
# mode first rack:
N° de mode exécuté lors de l'introduction du premier rack dans la machine. Lorsqu'une nouvelle charge est introduite dans la machine (au poste de charge ou de la gare en machine), le système vérifie si une autre charge est déjà en traitement. Si ce n'est pas le cas, ce mode est exécuté.
# mode last rack:
N° de mode exécuté lors du retrait du dernier rack de la machine. Lorsqu'une charge est déposée sur un poste de décharge ou dans une gare, le système vérifie si d'autres charges se trouvent toujours en traitement. Si ce n'est pas le cas, ce mode est exécuté.
# mode last movement:
Mode "Diagram/OPI" seulement. Lorsque le dernier mouvement prévu dans le diagramme est effacé (après son exécution), ce mode est exécuté.
Time before delay (sec):
Mode "Diagram/OPI" seulement. Temps après lequel un retard est détecté. A chaque transfert d'une charge d'une position à une autre, le système vérifie si le temps prévu pour un mouvement est dépassé. Si le dépassement est plus grand que le temps défini dans ce paramètre alors l'horloge du séquenceur est retardé de ce temps. Ceci permet de synchroniser les mouvements des transporteurs et des charges.
Hoist type:
Utilisé pour compatibilité avec les anciens systèmes sous DOS. Ne pas remplir ce champ.
Alarm delay (sec):
Ce paramètre est utilisé en association avec le paramètre "Time before delay(sec)". Si l'horloge du séquenceur est retardé de plus du temps défini dans ce paramètre, une alarme est généré. Cela veut dire que le digramme ne peut plus avancer car il est en attente d'un événement.
Execution delay (ms):
Intervalle en milli secondes entre chaque exécution du séquenceur de mouvements. Doit être ajusté entre 50 et 300 milli secondes.
# mode OK start program:
Lorsque le système calcul l'intégration d'une charge dans la machine, il teste le ou les modes définis dans ce paramètre. Si la comparaison est vérifié, le chargement sera autorisé. Dans le cas contraire, le chargement sera interdit. Les modes à tester doivent être séparés par une virgule. Exemple: 90,95,98. Dans cette exemple, il faut que les modes 90, 95 et 98 soient vérifiés pour permettre le chargement.
La comparaison n'est faite que sur les éléments des positions en service. Les éléments des positions hors service ne sont pas comparés.
# mode program stop:
Lorsque l'opérateur sélectionne le mode programme Auto, le système vérifie si ce paramètre contient un numéro. Si c'est le cas alors il vérifie si la comparaison du mode défini dans ce paramètre est validé. Si la comparaison n'est pas validé (valeurs du mode <> état machine) le mode programme Stop est forcé.
En mode "Diagram/OPI" ce mode est continuellement vérifié. Si, pendant l'exécution, la comparaison n'est plus vérifiée le système passe en mode programme Stop.
La comparaison n'est faite que sur les éléments des positions en service. Les éléments des positions hors service ne sont pas comparés.
Dec Tmin for reporting (sec):
En mode "Diagram/OPI" il est possible que les temps calculés ne soient pas tout à fait exactes. Si les temps de déplacement réels sont plus grand que les temps calculés, les immersions dans les cuves seront un peu plus courtes que prévues et lors de la vérification des TMin pour les rapports de suivi, des alarmes TMin peuvent être générées. Ce paramètre permet de diminuer le TMin prévu dans la séquence pour la vérification du temps d'immersion du contrôle de suivi.
Security Level to access Server:
Niveau d'accès minimum nécessaire pour accéder au serveur.