Mode=0 (Rampe à gravitation) |
  
|
Mode=0 (Rampe à gravitation) |
|
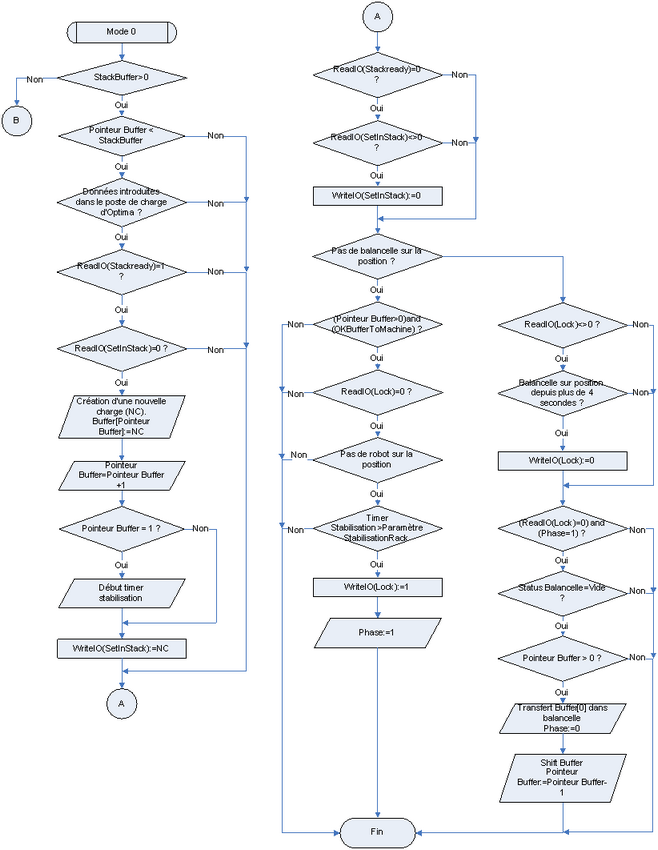
Ce mode correspond à une rampe de charge à gravitation avec un échantillonnage à l'entrée et un autre échantillonnage à la sortie. Les mots clefs suivants doivent être définis:
Mot clefs |
Fonctionnalité |
|---|---|
Mode |
=0 |
StackBuffer |
=Nombre de balancelles pouvant être stockées entre les 2 échantillonnages (maximum 15). |
StackReady |
=N° de l'I/O indiquant qu'une balancelle est présente à l'entrée de la rampe, prête à être chargée. |
SetInStack |
=N° de l'I/O permettant d'activer le premier échantillonnage (introduction dans la rampe). Cette sortie est actionnée lorsque l'entrée Stackready est activée et qu'une charge à été définie au poste de charge. Elle est remise à zéro lorsque l'entrée Stackready disparaît. |
Lock |
=N° de l'I/O permettant d'activer le 2ème échantillonnage. Cette sortie est actionnée lorsqu'il y a au moins une balancelle sur la rampe (entre les 2 échantillonnages) et que le mode de fonctionnement de la rampe est en AUTO et que le robot ne se trouve pas sur la position et que le temps de stabilisation de la balancelle dans la rampe est plus grand que la valeur sélectionnée dans les paramètres du serveur (Rack stabilisation on load buffer) et qu'il n'y a pas de charge dans la position de la machine correspondant au poste de charge. Elle reste activée jusqu'à ce qu'une charge est définie dans la position et que la sortie est activé pour au moins 5 secondes. |
InfoLU |
=N° de l'I/O indiquant à l'automate programmable qu'une nouvelle charge à été définie dans la machine (toggle). Si = 0 alors cette fonction n'est pas exécutée. |
Position |
=Numéro de la position machine |
AutoAdd |
=N° de l'I/O permettant d'ajouter automatiquement une charge vide dans la position de la machine. Si cette I/O est activée et que la position de la machine est vide, une nouvelle charge est ajoutée automatiquement. (correspond en général au détecteur présence de charge dans la machine de la rampe). |
AutoRemove |
=N° de l'I/O permettant d'effacer automatiquement la charge de la position machine. Si cette I/O est déactivée (=0) et qu'une charge se trouve dans la machine, celle-ci est effacée automatiquement. |