Types de montée/descente (FCL) |
  
|
Types de montée/descente (FCL) |
|
Pour accéder à la fenêtre de définition des types de montée/descente, sélectionner le menu { Edition ¦ Edition des types de montées/descente }. La fenêtre suivante s'affiche:
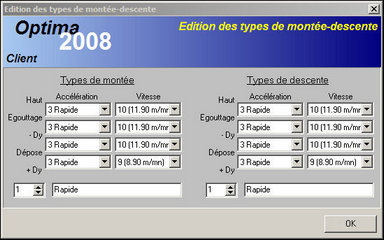
Les montées sont définies en 4 pas :
1.Depuis dessous la charge jusqu’à la hauteur de dépose.
2.Depuis la hauteur de dépose jusqu’à la hauteur de dépose plus Dy.
3.Depuis la hauteur de dépose plus Dy jusqu’à la hauteur d’égouttage.
4.Depuis la hauteur d’égouttage jusqu’à la hauteur de transfert haut.
Les descentes sont définies également en 4 pas :
1.Depuis la hauteur de transfert haut jusqu’à la hauteur d’égouttage
2.Depuis la hauteur d’égouttage jusqu’à la hauteur de dépose plus Dy.
3.Depuis la hauteur de dépose plus Dy jusqu’à la hauteur de dépose.
4.Depuis la hauteur de dépose jusqu’à la hauteur de passage par dessous.
Si une vitesse ou une accélération est différente du pas précédant, un arrêt du robot sera effectué. A la montée, l’arrêt à la hauteur d’égouttage est exécuté seulement si un temps d’égouttage est programmé.
Lorsque plusieurs mouvement successifs sont définis avec les mêmes paramètres (accélération et vitesse), ils sont transformés en un seul mouvement sinon ils seront exécutés à la suite: accélération jusqu'à la vitesse sélectionnée, déplacement, décélération jusqu'à l'arrêt, puis le prochain mouvement etc...